| 順位 | ロボット名 | 操作者 | 所属 | 記録 |
| 1 | ふぁはぁはぁはぁー、正義は勝つのだ! | 大西 祐介 | WMMC | 1分0秒084 |
| 2 | 前忠 | 伊藤研究室マウス班C | 東北工業大学電子工学科 | 2分31秒56 |
| 3 | 一夜城 | 鈴木 崇裕 | 芝浦工業大学 | 3分5秒218 |
| 4 | Bonito | 大河原 朋裕 | 東北工業大学 | 4分57秒886 |
| Op1 andante | 丸尾 清仁 | WMMC | リタイア | |
| タングステン | 古川工業高校TeamW | 古川工業高校電子研究部 | リタイア | |
| ラピート | 増田 悠一 | WMMC | リタイア | |
| JACKAL | 伊藤研究室マウス班B | 東北工業大学電子工学科 | リタイア | |
| 影炎 | 古川工業高校TeamB | 古川工業高校電子研究部 | リタイア | |
| おいらはリッキー! | 石川 力 | WMMC | リタイア | |
| NOチャン | 古川工業高校TeamA | 古川工業高校電子研究部 | リタイア | |
| Lwing | 鷲尾 泰之 | WMMC | リタイア |
| 順位 | ロボット名 | 操作者 | 所属 | 記録 |
| 1 | TYU三郎+ | 小川 靖夫 | 14秒247 | |
| 2 | 長工-1 | 大津 祥仁 | 長井工業高校 | 14秒551 |
| 3 | 長工-2 | 蒲生 郷 | 長井工業高校 | 16秒037 |
| 4 | 山形支部標準マウス1号 | 能登屋 清司 | 16秒040 | |
| 5 | ZAO-01 | 鈴木 智博、高木 稔弥、金子 慧多 | 蔵王高校情報機械科 | 18秒071 |
| 6 | NAGAKO-3 | 佐藤 譲二 | 長井工業高校 | 18秒283 |
| 7 | Bills | 伊藤研究室マウス班A | 東北工業大学電子工学科 | 43秒126 |
| 8 | すかいたーぼ | 小林 亮 | 芝浦工業大学ロボティックス研究室 | 2分45秒569 |
| 長工-4 | 須藤 薫 | 長井工業高校 | リタイア | |
| ZAO-02 | 瀬野 徹、鈴木 貴好、小野 卓哉 | 蔵王高校情報機械科 | リタイア | |
| はら3 | 原 耕司 | WMMC | 棄権 |
| 奨励賞 | 古川工業高校電子研究部 |
| 山形支部標準マウス開発貢献賞 | 能登屋 清司 |
| 奨励賞(マイコンゼミ標準モデル) | 芝浦工業大学 鈴木 崇裕 |








| 順位 | ロボット名 | 操作者 | 記録 |
| 1 | マイクロマウス3 | 井谷 優 | 6秒694 |
| 2 | 翡翠 | 中島史敬 | 7秒367 |
| 3 | SATO CHAN | 安藤春行 | 9秒750 |
| 4 | MIKE2004 | 森永英一郎 | 10秒265 |
| 5 | ジャイロマウス | 高味宏行 | 10秒628 |
| 6 | momoko3.10X | 米 真一 | 11秒187 |
| 7 | クマ2号 | 稲熊 彰 | 11秒804 |
| 8 | MUKUⅢ | 水野和男 | 23秒762 |
| 9 | 焼肉腹一杯 | 古賀衣織 | 54秒158 |
| 10 | マシュマロ | 大響将太 | 1分10秒696 |
| 11 | MoleⅩ | 高山孝司 | 3分19秒805 |
| C&A | 高味宏行 | R | |
| MoleⅨ | 高山孝司 | R | |
| 酒池肉林 | 古谷倫祥 | R | |
| 1号マウス改 | 阪口義明 | R | |
| ゼロマウス | 船井慎吾 | R | |
| みむめも-5 | 平野康博 | R | |
| 肉弾ブルース | 北沢 良 | R | |
| MICHY5s | 兼平貴司 | R | |
| マイクロマウス4 | 井谷 優 | R |
| 順位 | ロボット名 | 操作者 | 記録 |
| 1 | マイクロマウス4 | 井谷 優 | 10秒635 |
| 2 | 翡翠 | 中島史敬 | 10秒778 |
| 3 | マイクロマウス3 | 井谷 優 | 10秒992 |
| 4 | MIKE2004 | 森永英一郎 | 13秒123 |
| 5 | SATO CHAN | 安藤春行 | 13秒990 |
| 6 | クマ2号 | 稲熊 彰 | 16秒505 |
| 7 | みむめも-5 | 平野康博 | 26秒378 |
| momoko3.10X | 米 真一 | R |
| 順位 | ロボット名 | 操作者 | 記録 |
| 1 | スミス | 竹本隆一 | 27秒38 |
| 工学院005 | 鈴木 翔 | R(45秒71) | |
| AAA | 中西 埋 | R(51秒84) | |
| グレイブ | 近藤智幸 | R | |
| 八太郎 | 長澤孝紀 | R | |
| デジQ改 | 伊藤ひさし | R | |
| レボ | 山本将弘 | R |











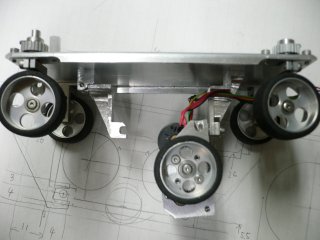
| width | 64mm |
| length | 129mm |
| hight | |
| weight | |
| tread(out side) | 61mm |
| wheelbase | 103mm |
| drive motor | DC motor*2 %%6V 4.5W%% 8W gear retio 3:1 %%ESCAP 16G88-220E%% HOMARE21 |
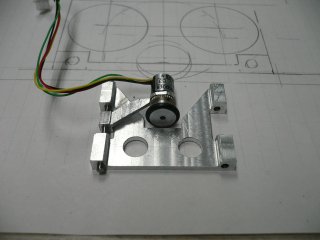
| steering motor | DC geared motor*2 6V 2.3W gear retio 41:1 MINIMOTOR 1717T006SR(16AKtype) |
| steering position sensor | VR 5Kohm*2 |
| trip sensor | rotary encoder 360P/rev 2phase MRT MES-6-360PC |
| direction sensor | piezoelectric vibratory gyroscope MURATA GYRO STAR ENC-03 |
| wall sensor | infrared reflection sensor(lenear)*6 |
| power source | Li-Po battery 7.4V 340mA/h |
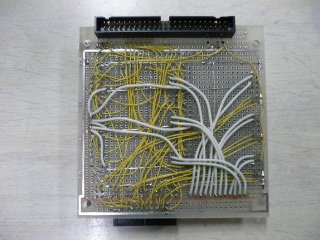
| CPU | Lenesus SH2/7144 clock 40MHz |
| program language | C |
| tool | GCC |
 mm4.MOV
mm4.MOV